Projectile dynamics ODE¶
1. ODE system¶
import numpy as np
from openmdao.api import ExplicitComponent
class ProjectileSystem(ExplicitComponent):
def initialize(self):
self.metadata.declare('num_nodes', default=1, type_=int)
self.g = -9.81
def setup(self):
num = self.metadata['num_nodes']
self.add_input('vx', shape=(num, 1))
self.add_input('vy', shape=(num, 1))
self.add_output('dx_dt', shape=(num, 1))
self.add_output('dy_dt', shape=(num, 1))
self.add_output('dvx_dt', shape=(num, 1))
self.add_output('dvy_dt', shape=(num, 1))
self.declare_partials('*', '*', dependent=False)
self.declare_partials('dx_dt', 'vx', val=1., rows=np.arange(num), cols=np.arange(num))
self.declare_partials('dy_dt', 'vy', val=1., rows=np.arange(num), cols=np.arange(num))
def compute(self, inputs, outputs):
outputs['dx_dt'] = inputs['vx']
outputs['dy_dt'] = inputs['vy']
outputs['dvx_dt'] = 0.
outputs['dvy_dt'] = self.g
2. ODEFunction¶
import numpy as np
import time
from ozone.api import ODEFunction
from ozone.tests.ode_function_library.projectile_dynamics_sys import ProjectileSystem
class ProjectileFunction(ODEFunction):
def initialize(self, system_init_kwargs=None):
self.set_system(ProjectileSystem, system_init_kwargs)
self.declare_state('x', 'dx_dt', shape=1)
self.declare_state('y', 'dy_dt', shape=1)
self.declare_state('vx', 'dvx_dt', shape=1, targets=['vx'])
self.declare_state('vy', 'dvy_dt', shape=1, targets=['vy'])
def get_test_parameters(self):
t0 = 0.
t1 = 1.
initial_conditions = {
'x': 0.,
'y': 0.,
'vx': 1.,
'vy': 1.,
}
return initial_conditions, t0, t1
def get_exact_solution(self, initial_conditions, t0, t):
g = -9.81
x0 = initial_conditions['x']
y0 = initial_conditions['y']
vx0 = initial_conditions['vx']
vy0 = initial_conditions['vy']
x = x0 + vx0 * (t - t0)
y = y0 + vy0 * (t - t0) + 0.5 * g * (t - t0) ** 2
vx = vx0
vy = vy0 + g * (t - t0)
return {'x': x, 'y': y, 'vx': vx, 'vy': vy}
3. Run script and output¶
import numpy as np
import matplotlib.pyplot as plt
from openmdao.api import Problem
from ozone.api import ODEIntegrator
from ozone.tests.ode_function_library.projectile_dynamics_func import ProjectileFunction
ode_function = ProjectileFunction()
t0 = 0.
t1 = 1.
initial_conditions = {
'x': 0.,
'y': 0.,
'vx': 1.,
'vy': 1.,
}
num = 100
times = np.linspace(t0, t1, num)
method_name = 'RK4'
formulation = 'solver-based'
integrator = ODEIntegrator(ode_function, formulation, method_name,
times=times, initial_conditions=initial_conditions,
)
prob = Problem(integrator)
prob.setup()
prob.run_model()
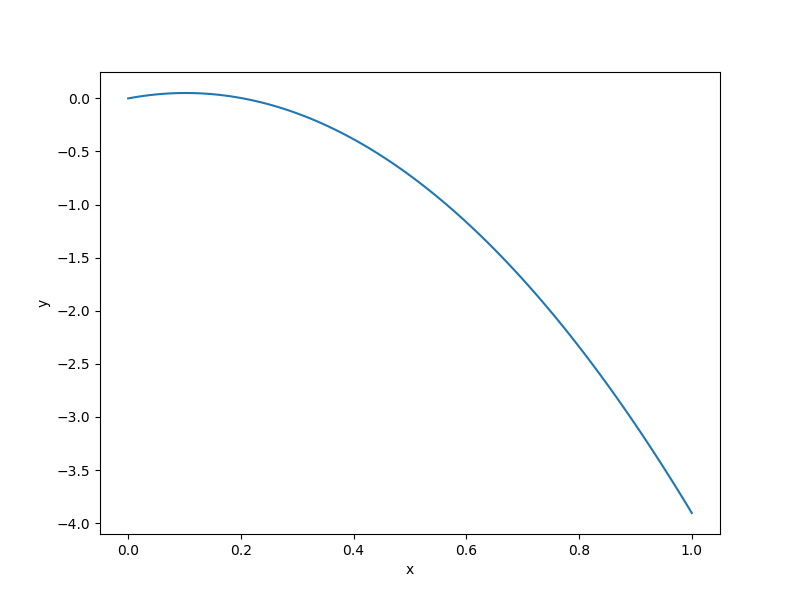
plt.plot(prob['state:x'], prob['state:y'])
plt.xlabel('x')
plt.ylabel('y')
plt.show()
WARNING: Group 'integration_group' has the following cycles: [['ode_comp', 'vectorized_stagestep_comp']]
WARNING: System 'integration_group.ode_comp' executes out-of-order with respect to its source systems ['integration_group.vectorized_stagestep_comp']
=================
integration_group
=================
NL: NLBGS 0 ; 217.25336 1
NL: NLBGS 1 ; 112.709038 0.51879077
NL: NLBGS 2 ; 0 0
NL: NLBGS Converged