Simple nonlinear ODE¶
1. ODE system¶
import numpy as np
from openmdao.api import ExplicitComponent
class SimpleNonlinearODESystem(ExplicitComponent):
def initialize(self):
self.metadata.declare('num_nodes', default=1, type_=int)
def setup(self):
num = self.metadata['num_nodes']
self.add_input('y', shape=(num, 1))
self.add_input('t', shape=num)
self.add_output('dy_dt', shape=(num, 1))
# self.declare_partials('dy_dt', 'y', val=np.eye(num))
self.declare_partials('dy_dt', 't', rows=np.arange(num), cols=np.arange(num))
self.declare_partials('dy_dt', 'y', rows=np.arange(num), cols=np.arange(num))
self.eye = np.eye(num)
def compute(self, inputs, outputs):
# True solution: 2 / (2*C1 - x^2)
outputs['dy_dt'][:, 0] = inputs['t'] * np.square(inputs['y'][:, 0])
def compute_partials(self, inputs, partials):
partials['dy_dt', 'y'] = (2*inputs['t']*inputs['y'][:, 0]).squeeze()
partials['dy_dt', 't'] = np.square(inputs['y'][:, 0]).squeeze()
2. ODEFunction¶
import numpy as np
from ozone.api import ODEFunction
from ozone.tests.ode_function_library.simple_nonlinear_sys import SimpleNonlinearODESystem
class SimpleNonlinearODEFunction(ODEFunction):
def initialize(self):
self.set_system(SimpleNonlinearODESystem)
self.declare_state('y', 'dy_dt', targets='y')
self.declare_time(targets='t')
def get_test_parameters(self):
t0 = 0.
t1 = 1.
initial_conditions = {'y': 1.}
return initial_conditions, t0, t1
def get_exact_solution(self, initial_conditions, t0, t):
# True solution: 2 / (2*C - t^2)
# outputs['dy_dt'] = inputs['t'] * np.square(inputs['y'])
y0 = initial_conditions['y']
C = (2. / y0 + t0 ** 2) / 2.
return {'y': 2. / (2. * C - t ** 2)}
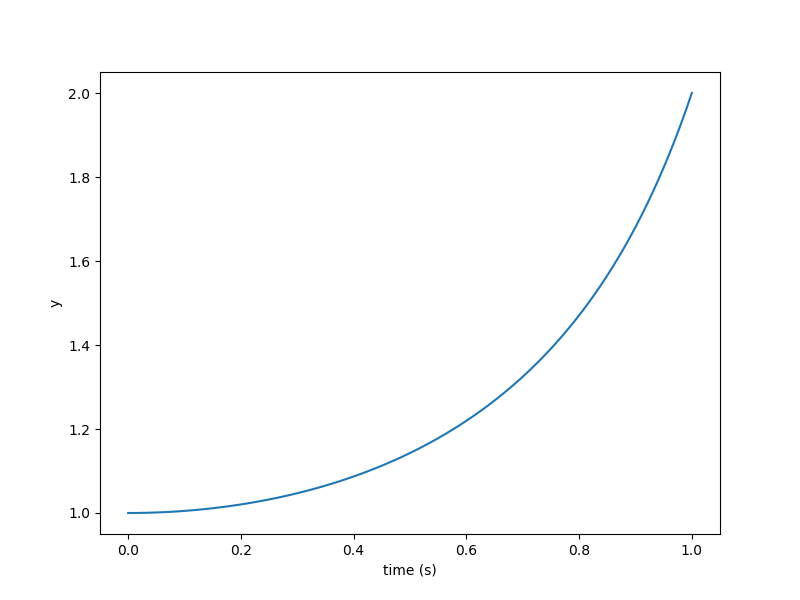
3. Run script and output¶
import numpy as np
import matplotlib.pyplot as plt
from openmdao.api import Problem
from ozone.api import ODEIntegrator
from ozone.tests.ode_function_library.simple_nonlinear_func import \
SimpleNonlinearODEFunction
ode_function = SimpleNonlinearODEFunction()
t0 = 0.
t1 = 1.
initial_conditions = {'y': 1.}
num = 100
times = np.linspace(t0, t1, num)
method_name = 'RK4'
formulation = 'solver-based'
integrator = ODEIntegrator(ode_function, formulation, method_name,
times=times, initial_conditions=initial_conditions,
)
prob = Problem(integrator)
prob.setup()
prob.run_model()
plt.plot(prob['times'], prob['state:y'])
plt.xlabel('time (s)')
plt.ylabel('y')
plt.show()
=================
integration_group
=================
NL: NLBGS 0 ; 16.2481804 1
NL: NLBGS 1 ; 8.99057129 0.553327884
NL: NLBGS 2 ; 5.25549451 0.323451265
NL: NLBGS 3 ; 2.3091862 0.14211968
NL: NLBGS 4 ; 0.78372072 0.0482343684
NL: NLBGS 5 ; 0.212933 0.0131050367
NL: NLBGS 6 ; 0.0479807709 0.00295299348
NL: NLBGS 7 ; 0.00923486381 0.000568362953
NL: NLBGS 8 ; 0.00155294802 9.55767344e-05
NL: NLBGS 9 ; 0.000232098823 1.4284604e-05
NL: NLBGS 10 ; 3.12388759e-05 1.92260765e-06
NL: NLBGS 11 ; 3.82602625e-06 2.35474136e-07
NL: NLBGS 12 ; 4.3003494e-07 2.64666522e-08
NL: NLBGS 13 ; 4.46693954e-08 2.74919371e-09
NL: NLBGS 14 ; 4.3135972e-09 2.65481863e-10
NL: NLBGS 15 ; 3.89222605e-10 2.39548426e-11
NL: NLBGS 16 ; 3.29592108e-11 2.02848626e-12
NL: NLBGS 17 ; 2.62811994e-12 1.6174857e-13
NL: NLBGS Converged